Use mujoco bindings instead of mujoco_py #2595
Conversation
gym/envs/mujoco/ant_v3.py
Outdated
| def _get_obs(self): | ||
| position = self.sim.data.qpos.flat.copy() | ||
| velocity = self.sim.data.qvel.flat.copy() | ||
| position = self.sim.position().flat.copy() |
There was a problem hiding this comment.
This are minor changes. I felt the attributes are more accessible
|
@ikostrikov could you please take a look at this? |
|
I ran the tests here: It passes all of them. But I would also suggest running deterministic training to verify that results are identical (or at least similar enough). Right now, my training code is non-deterministic. It will be very useful if you know someone who could test that. However, the viewer doesn't work for me on v2 versions of the environments. It works on v3, though. Tested on mac with m1 and ubuntu. Here is a script to reproduce the issue: import gym
env = gym.make('HalfCheetah-v2')
env.reset()
env.render()Error: Traceback (most recent call last):
File "/Users/kostrikov/GitHub/gym_dmc/tmp.py", line 16, in <module>
env.render()
File "/Users/kostrikov/miniconda3/envs/py39/lib/python3.9/site-packages/gym/core.py", line 269, in render
return self.env.render(mode, **kwargs)
File "/Users/kostrikov/miniconda3/envs/py39/lib/python3.9/site-packages/gym/core.py", line 269, in render
return self.env.render(mode, **kwargs)
File "/Users/kostrikov/miniconda3/envs/py39/lib/python3.9/site-packages/gym/envs/mujoco/mujoco_env.py", line 161, in render
self.viewer_setup()
File "/Users/kostrikov/miniconda3/envs/py39/lib/python3.9/site-packages/gym/envs/mujoco/half_cheetah.py", line 39, in viewer_setup
self.viewer.cam.distance = self.model.stat.extent * 0.5
AttributeError: 'WindowViewer' object has no attribute 'cam'One minor nitpick (feel free to ignore): qpos/qvel in mujoco corresponds to joint position/velocity. At the same time, xpos/xvel corresponds to global cartesian position/velocity. |
Hi @ikostrikov. Thank you for your feedback. I actually haven't updated the v2 environments for the new render since I though they will be deprecated. Should I update them? Won't take me long |
|
@rodrigodelazcano if it doesn't take too much time, it will be very useful. Many codebases still use v2 by default even though they are deprecated. |
Done :) |
gym/envs/mujoco/humanoid.py
Outdated
| self.viewer.cam.elevation = -20 | ||
| self.viewer.set_free_camera_settings( | ||
| trackbodyid=2, | ||
| distance=self.model.stat.extent * 1.0, |
| ) | ||
|
|
||
| DEFAULT_SIZE = 500 | ||
| DEFAULT_SIZE = 480 |
There was a problem hiding this comment.
Is the change from 500 to 480 necessary?
|
@rodrigodelazcano, thanks again for your work on the viewer! I did another pass on the commits. Please take a look. Also, could you squash all commits into one after reviewing my comments? Thanks! |
984ddfc to
04ee74f
Compare
|
Thanks for helping with the review @ikostrikov. I made all the changes, if you can have a final look at it that will be great. |
|
@rodrigodelazcano it looks great now! Thanks a lot! |
05b0138 to
520a398
Compare
|
@ikostrikov can you please review this PR again rodrigo made a bunch of changes |
|
@JamesKCS could you please make sure your issues with ant are properly resolved here too? |
@jkterry1 Thank you for looking into this. I tried to check, but I think I am doing something wrong. I made a new conda environment named |
|
@jkterry1 I apologize for the slow reply. I'm getting the same error as above. File "/home/kostrikov/miniconda3/envs/test_mujoco39/lib/python3.9/site-packages/gym/envs/mujoco/__init__.py", line 15, in <module>
from gym.envs.mujoco.pusher import PusherEnv
File "/home/kostrikov/miniconda3/envs/test_mujoco39/lib/python3.9/site-packages/gym/envs/mujoco/pusher.py", line 5, in <module>
import mujoco_py
ModuleNotFoundError: No module named 'mujoco_py' |
|
@JamesKCS , @ikostrikov and @jkterry1, sorry for that. I removed the dependency for mujoco_py since it will be deprecated in the future. In the last commit I recovered it, please try now. Also, @JamesKCS, the contact force issue has only been solved for version 4 environments (Ant-v4) |
|
PusherEnv does not seem to depend on mujoco_py in any way Line 5 in 78d2b51 Is it possible to remove this line (and mujoco_py dependency as well)? |
|
Should mujoco_py dependency be removed despite keeping the past versions of mujoco environments? |
|
@rodrigodelazcano one potential solution is to have both gym[mujoco] and gym[dm_control], and provide an explanation in the readme + add a warning that gym[mujoco] is deprecated. @jkterry1 what do you think? |
|
@rodrigodelazcano I like ikostrikov's proposal, lets do that |
|
Instead of saying mujoco-py is deprecated, just say it's unmaintained. We aren't going to/can't drop support for older mujoco-py based versions for the foreseeable future, it's deprecated may not be the best description. |
|
Also @rodrigodelazcano , this PR doesn't overwrite the removals in this PR right? #2651 |
|
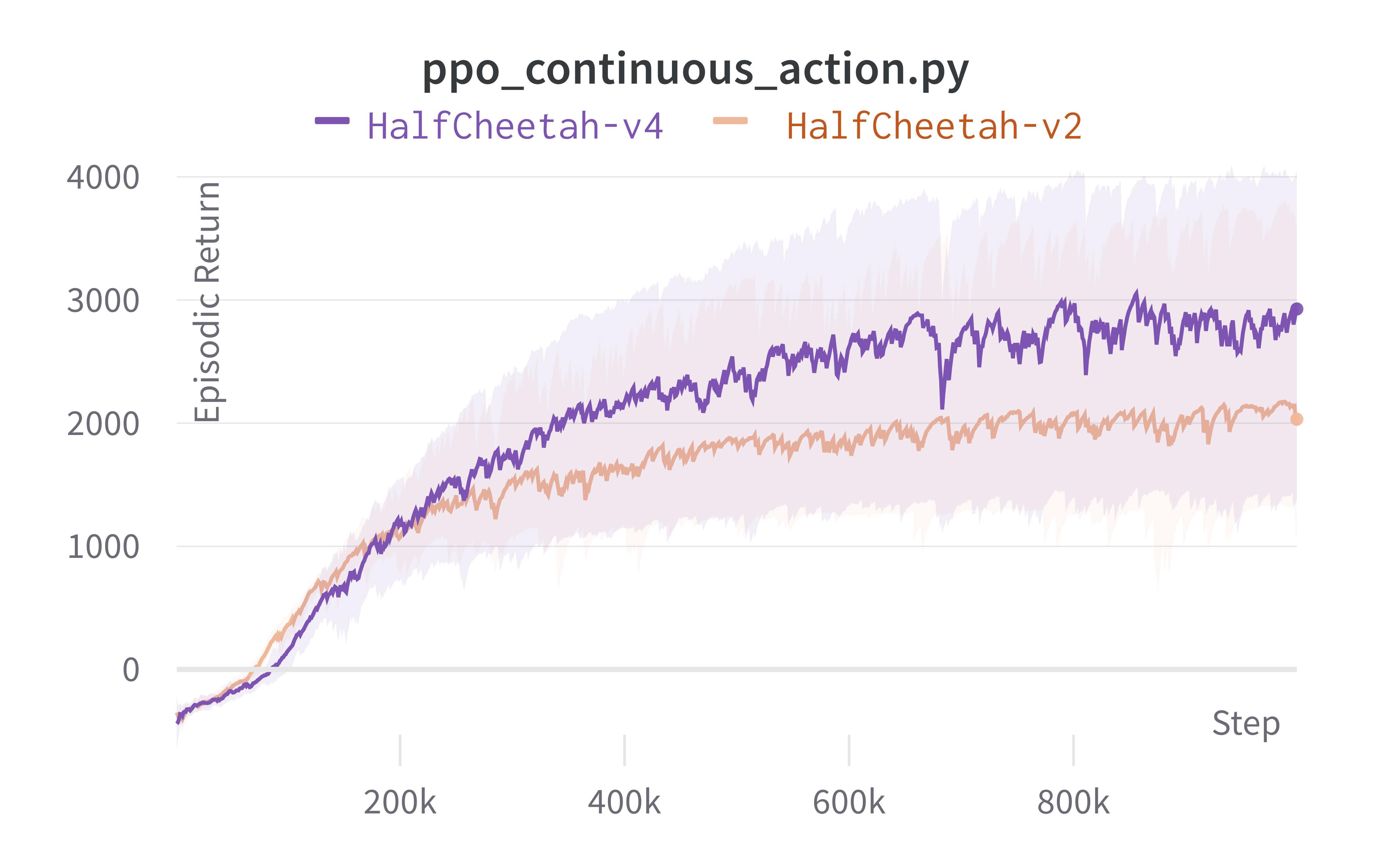
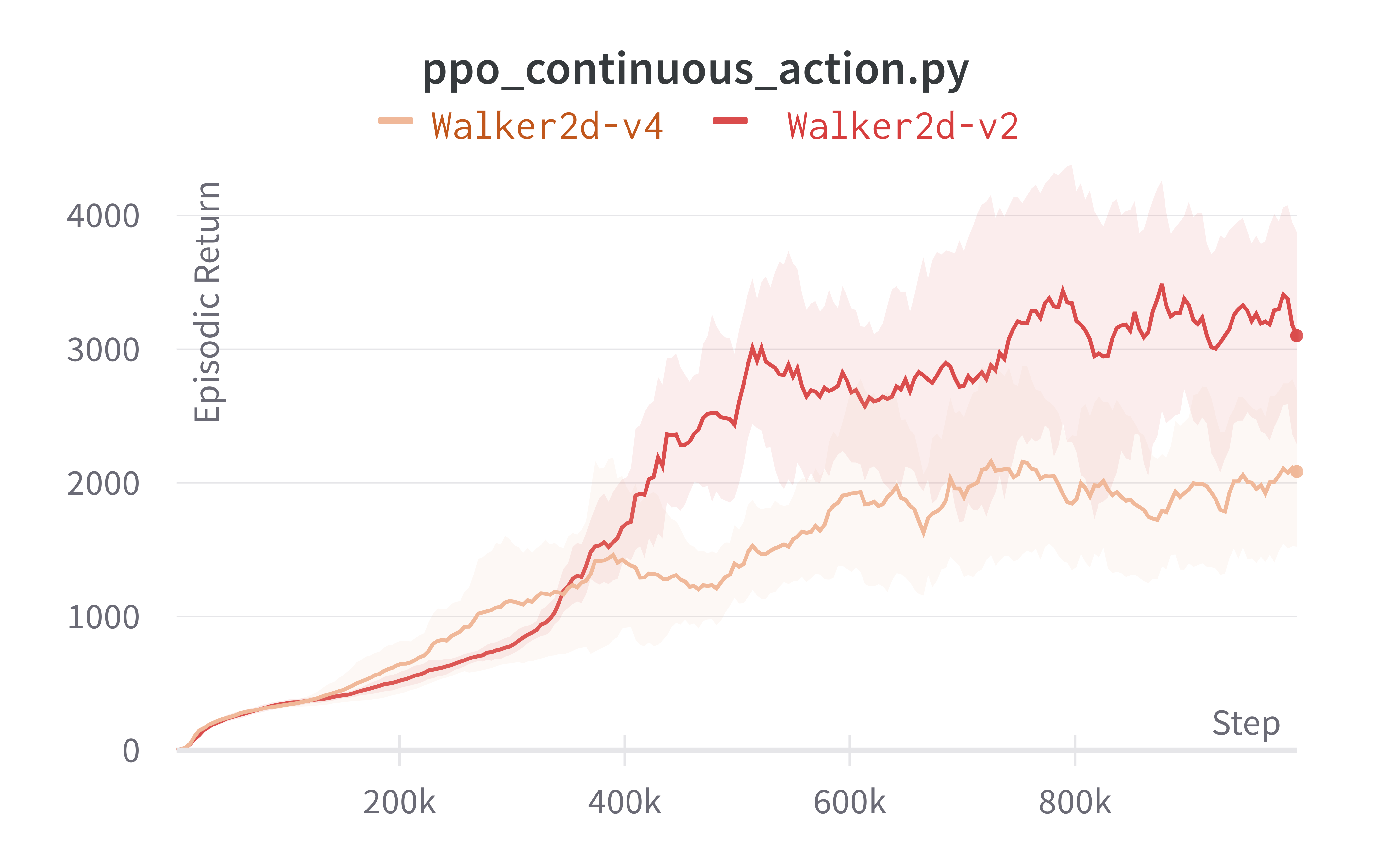
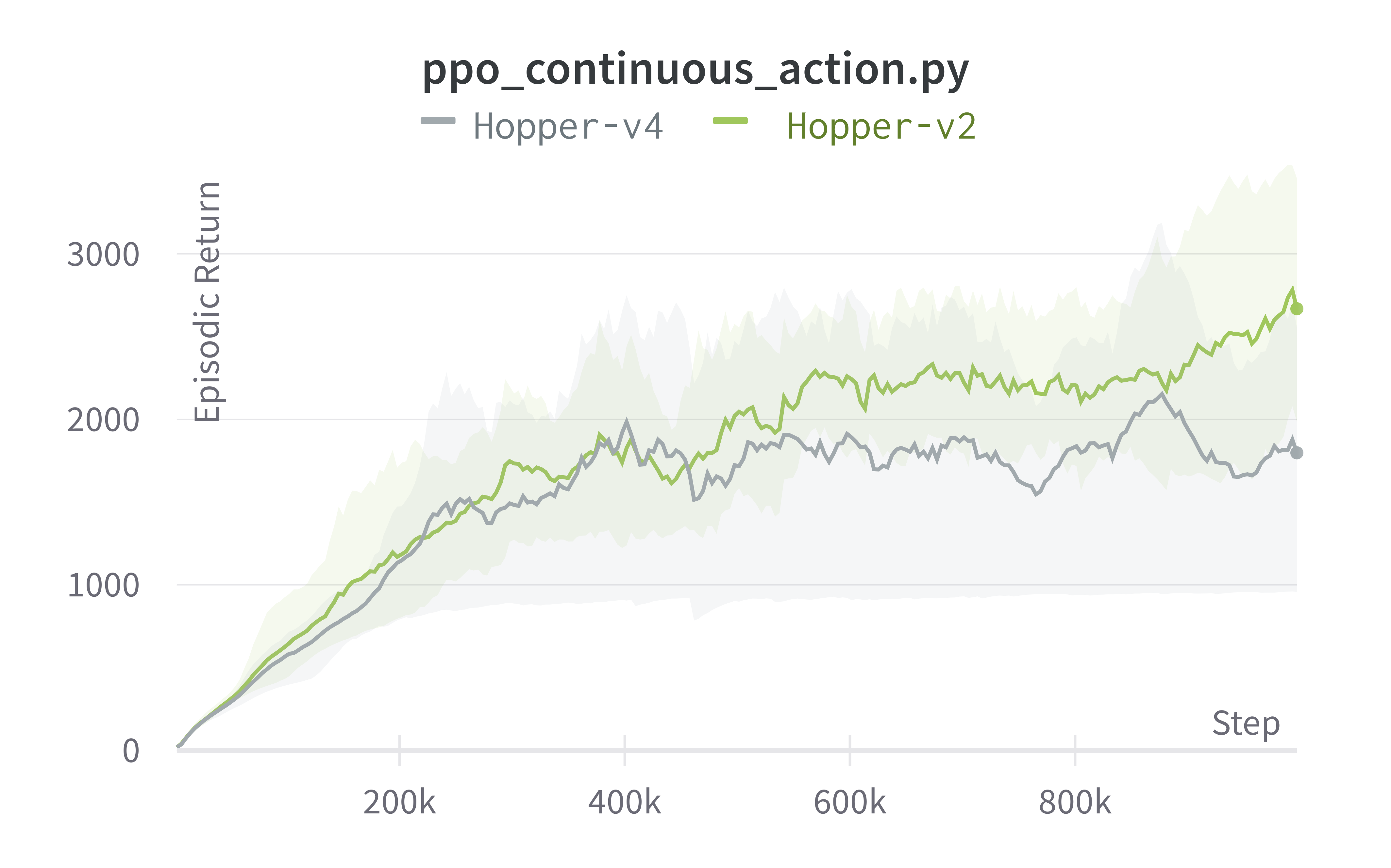
Costa ran some basic experiments: https://wandb.ai/costa-huang/cleanRL/reports/MuJoCo-v2-vs-v4-environments--VmlldzoxNjM1OTAx The changes appear to be within acceptable deviations for a version bump |
|
Per @jkterry1's suggestion, I started running some benchmarks to see if there are breaking performance changes. Report here: https://wandb.ai/costa-huang/cleanRL/reports/MuJoCo-v2-vs-v4-environments--VmlldzoxNjM1OTAx Code here: https://github.com/vwxyzjn/validate-new-gym-mujoco-envs
So... ya they may be different (I personally find mujoco envs shows greater variance with random seeds, and that the means of the curve roughly fall into the min/max range of other curves), c'est la vie" @jkterry1 |
|
@ikostrikov email me at [email protected], I'll give you my discord information. Basically the people involved in gym are coordinated over discord. |
|
For future travelers, after some experimentation between cost and rodrigo, the cause for the performance changes was that we fixed the very long standing bugs with contact forces being zero in ant and walker2d. |
* fix impulse sample bug and add adjustable gravity * revert weird sample thing * assertation * add wind * fix wind to use applyforce * black * add tests for wind * fix test bug * run lunar lander tests over 10 runs * reduce wind for heuristic landing * made wind power kwarg * reduce wind power for heuristic landing * update doc * remove wind power from kwarg * fix tests by deleting tests ;) * Add back wind power as kwarg * the black sheep * remove rogue plus
* first commit domain randomize * black * update doc * add some type hints and internalized some functions * we were told, the black bear is innocent; but I should not like to trust myself wit him * Don't need two color conventions * don't multiply twice * hardcore -> domain_randomize & register * remove rogue decorator
… the variable names (openai#2755)
* fix impulse sample bug and add adjustable gravity * revert weird sample thing * assertation * add wind * fix wind to use applyforce * black * add tests for wind * fix test bug * run lunar lander tests over 10 runs * reduce wind for heuristic landing * made wind power kwarg * reduce wind power for heuristic landing * update doc * remove wind power from kwarg * fix tests by deleting tests ;) * Add back wind power as kwarg * the black sheep * remove rogue plus * slight doc fix and variable rename * fix bug with track turn indicators * black
|
Looking ahead, there are two other large PR (#2671 and #2752) happening that will affect this PR as those updates will have to be replicated over to this PR, i.e. render API and two done API |
|
I would prefer to merge this PR and make a release if possible. #2671 and #2752 are much larger refactoring and could break existing code. @rodrigodelazcano let me know if you have finalized the changes. I would be happy to do another round of benchmarks since contact force setting is changed. |
* refactoring play function. Tests for keys to action mapping. * Add mocking pygame events. * partial event processing in class. * pre-commit. * quit pygame after tests. * fix typos in functions names. * Add type hint. * Add test for play function. * remove mockKeyEvent. * remove unused main code. * Adding type hints. * catch custom exception in tests. * Fix magic numbers. * Add test with an actual environment. * fix comment. * Add TODO memo on env.render. * change map with list comprehension. * remove unused imports. * Add type hint. * typo. * docstring.
|
@vwxyzjn the past benchmarks should be enough. I'm trying to fix the CI to allow mujoco envs to be tested |
mujoco_bindings mujoco bindings mujoco bindings mujoco bindings dm_control for mujoco envs dm for mj_py mujoco v4 move viewer lint mujoco dependency remove mujoco_py pusherEnv setup dm_control contact forces remove print setup mujoco bindings no rendering rendering viewer_setup dependencies rebase fix dependencies pre-commit fix ping mujoco version fix mujoco test
|
@rodrigodelazcano Does that mean that we don't test the old environment can render or can old environment just not render anymore. I just want to check for backward compatibility |
|
@pseudo-rnd-thoughts it only means that the old environments are not being tested for rendering (new v4 envs are), because they were being also skipped on past releases and I not able to find the issue of them not passing test in headless systems . However, the rendering implementation for old mujoco versions is still the same and should work as usual. |
|
This PR has been moved to #2762 |
Changes made: